ĪĪĪĪąŻš²Ą─ę╗éĆ(g©©)ĘĮĘ©╩Ū─Żą═ŅA(y©┤)£y(c©©)┐žųŲĪŻį┌PLC╔ŽŽ╚įO(sh©©)ų├╔·«a(ch©Żn)įO(sh©©)éõĄ─Ė„“ī(q©▒)äė(d©░ng)▌Sł╠(zh©¬)ąąųĖ╩ŠŪķørĄ──Żą═ĪŻĖ∙ō■(j©┤)─Żą═Ż¼PLC┐╔ęįŅA(y©┤)£y(c©©)│÷įO(sh©©)éõ╔į║¾Ą─▀\(y©┤n)▐D(zhu©Żn)ŪķørĪŻ╚ń╣¹ŅA(y©┤)£y(c©©)ĄĮ▀\(y©┤n)▐D(zhu©Żn)Ģ■(hu©¼)Ų½ļxŅA(y©┤)Ų┌╬╗ų├Ż¼╗“╩Ū═Ēė┌ŅA(y©┤)Ų┌Ģr(sh©¬)┐╠Ż¼Š═Ģ■(hu©¼)═©▀^(gu©░)š{(di©żo)š¹ųĖ┴ŅŻ¼╩╣▀\(y©┤n)▐D(zhu©Żn)Ę¹║ŽŅA(y©┤)Ų┌ĪŻė├æ¶(h©┤)į┌Ė─▀M(j©¼n)ųĖ┴ŅĘĮĘ©Ģr(sh©¬)Ż¼▀Ć┐╔ęį└¹ė├PLCÖz“×(y©żn)ĘĮĘ©╩Ūʱėąą¦ĪŻ
ĪĪĪĪ┴Ēę╗éĆ(g©©)ĘĮĘ©╩ŪīW(xu©”)┴Ģ(x©¬)┐žųŲĪŻĖ∙ō■(j©┤)Ž┬▀_(d©ó)ųĖ╩ŠĢr(sh©¬)Ė„“ī(q©▒)äė(d©░ng)▌SĄ─ł╠(zh©¬)ąąŪķørš{(di©żo)š¹ųĖ┴ŅĪŻ▀@ĘNĘĮĘ©▓╗į┌PLCā╚(n©©i)ųŲū„─Żą═ĪŻ▒Š┤╬č▌╩ŠĄ─īW(xu©”)┴Ģ(x©¬)ĘĮĘ©▒╚▌^║å(ji©Żn)å╬Ż¼ų╗╩ŪĖ∙ō■(j©┤)▀\(y©┤n)▐D(zhu©Żn)ĮY(ji©”)╣¹ųą│÷¼F(xi©żn)Ą─Ų½▓Ņį÷£pųĖ┴ŅųĄŻ¼│²┤╦ų«═ŌŻ¼ę▓┐╔ęįŪČ╚ļŽ╚▀M(j©¼n)Ą─īW(xu©”)┴Ģ(x©¬)╦ŃĘ©ĪŻ
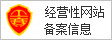
ĪĪĪĪ┴Ē═ŌŻ¼ÜW─Ę²ł▀Ćģó┐╝š╣│÷┴╦Ė▀Š½Č╚═¼▓ĮĖ„“ī(q©▒)äė(d©░ng)▌SĄ─č▌╩ŠĪŻč▌╩Šā╚(n©©i)╚▌╩Ū╩╣▐D(zhu©Żn)äė(d©░ng)łA░Õ╔ŽĄ─1³c(di©Żn)Ż¼┼cį┌╦«ŲĮ├µā╚(n©©i)čžā╔▌SęŲäė(d©░ng)Ą─ųĖßśĄ─╬╗ų├▒Ż│ųę╗ų┬Ż¼ĮĶ┤╦═¼▓Į3éĆ(g©©)“ī(q©▒)äė(d©░ng)▌SŻ©łDŻ®ĪŻ═©▀^(gu©░)ŅA(y©┤)┼ą├┐éĆ(g©©)▌SĒææ¬(y©®ng)Ą─čė▀tŪķørŻ¼╠ßŪ░Ž“čė▀tĄ─▌S░l(f©Ī)╦═ųĖ┴ŅŻ¼╩╣äė(d©░ng)ū„▒Ż│ųę╗ų┬ĪŻė├æ¶(h©┤)ėą═¹═©▀^(gu©░)NX/NJŽĄ┴ąĄ─▓┐╝■│╠ą“Ż©╣”─▄ēKŻ®└¹ė├▀@ĒŚ(xi©żng)┐žųŲ╣”─▄ĪŻįō╣½╦Š▒Ē╩ŠŻ║“╦┼Ę■±R▀_(d©ó)Ą╚ČÓ┼_(t©ói)═¼Ģr(sh©¬)▀\(y©┤n)▐D(zhu©Żn)Ą─įO(sh©©)éõį┌īŹ(sh©¬)ļH╣żū„Ą─Ģr(sh©¬)║“Ż¼┤¾Č╝Ģ■(hu©¼)│÷¼F(xi©żn)Ų½▓ŅĪŻ×ķ┤╦Č°ĖąĄĮ¤®É└Ą─ė├æ¶(h©┤)Ż¼┐ŽČ©─▄└ĒĮŌč▌╩ŠĄ─ęŌ┴x”Ż©ÜW─Ę²łŻ®ĪŻ
ĪĪĪĪNX/NJŽĄ┴ąĄ─╠Ä└ĒŲ„┼céĆ(g©©)╚╦ļŖ─Xę╗śėŻ¼ė╔├└ć°(gu©«)ėó╠žĀ¢╣½╦ŠųŲįņŻ©“┐ßŅŻi7”Ą╚Ż®Ż¼┐╔ęį═Ļ│╔┼céĆ(g©©)╚╦ļŖ─XŽÓ═¼Ą─ėŗ(j©¼)╦ŃŻ¼ę“┤╦ę▓┐╔ęįīŹ(sh©¬)¼F(xi©żn)─Żą═ŅA(y©┤)£y(c©©)┐žųŲĄ╚ĪŻÜW─Ę²ł▀Ćģó┐╝š╣│÷┴╦š²į┌ķ_(k©Īi)░l(f©Ī)Ą─“SysmacIPCŻ©IndustrialPCŻ®”Ż¼įōįO(sh©©)éõ═©▀^(gu©░)Ęų┼õ╠Ä└ĒŲ„ā╚(n©©i)║╦ė├üĒ(l©ói)▀\(y©┤n)ąąWindowsŻ¼─▄ē“═¼Ģr(sh©¬)ł╠(zh©¬)ąą┐žųŲ┼cWindowsöĄ(sh©┤)ō■(j©┤)╠Ä└ĒĪŻīóĀÄ(zh©źng)╚Īį┌2016─Ļ┤║╝Šęį║¾╔Ž╩ąĪŻ