������ ����τ�(d��ng)ʰ�z
4.4 Сˮ݆�l(f��)늙C(j��)��׃�l�{(di��o)��
�_(k��i)�l(f��)����
�Ϲ�(ji��)��B��ͨ�^(gu��)�}���{(di��o)�Ɓ�(l��i)�˷�ˮ݆�C(j��)��(d��o)�~�T�Եķ������mȻ���з���(y��ng)������(d��ng)��Ѹ�ٵȃ�(y��u)�c(di��n)��ȡ�������õ�Ч������Ҳ������һЩ���@�IJ�����
����������ˮ݆�C(j��)��(d��o)�~�đT�Ԍ�(sh��)�ںܴ������}�_���½��أ�������������ס�������װl(f��)��“���{(di��o)”��
������}�_ռ�ձȵĴ�С�����S��(sh��)�H�l���c��(bi��o)��(zh��n)�l��(50Hz) �g��ֵ(Δf) �Ĵ�С���Ԅ�(d��ng)�{(di��o)����
�����������}�_ͨ늷�ʽʹ����(d��ng)ϵ�y(t��ng)�ĸ��S������ܵ�?j��ng)_���������Ķ�Ӱ��˂���(d��ng)ϵ�y(t��ng)�ĉ�����
��ʮ���o(j��)��ʮ�����׃�l���đ�(y��ng)���_(k��i)ʼ�ռ���������Сˮ݆�l(f��)늙C(j��)�M���{(di��o)�������������������_(k��i)�l(f��)������׃�l�{(di��o)�ټ��g(sh��)��(l��i)�{(di��o)��(ji��)ˮ݆�C(j��)��(d��o)�~�_(k��i)�ȵ��{(di��o)������ȡ�����^�õ�Ч����
4.4.1 ˮ݆�C(j��)�D(zhu��n)�ٵIJɘ�
4.4.1.1 �l�ʨM늉��D(zhu��n)�Q
1. ����˼·
�l�ʨM늉��D(zhu��n)�Q�Ļ���˼·���Ǐı��y(c��)늉������������pȥһ��(g��)�̶��ĕr(sh��)�g���õ�ռ�ձ��c���y(c��)�l�ʳɱ������}�_ϵ�У��ٌ����}�_ϵ���M(j��n)�ОV�����õ��c���y(c��)�l�ʳ����ȵ�ֱ���ɘ�늉���
2. �l�ʲɘ�
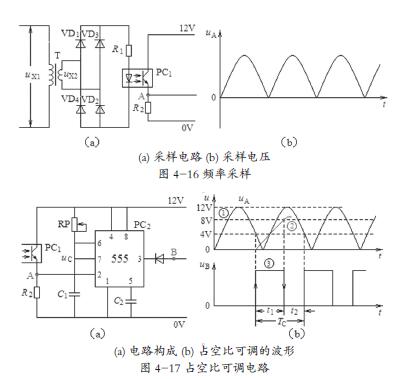
���Ƚ�(j��ng)׃����T ������õ�늉��^�͵IJɘ�늉�uX2���ֽ�(j��ng)VD1~VD4 �M(j��n)��ȫ�����������ɾ��Թ���Ϲܵõ��l�ʵIJɘ�늉�uA����D4-16(a) ��ʾ��uA �IJ�����D4-16(b)��ʾ��
3. ռ�ձȿ��{(di��o)�·
��D4-17(a) ��ʾ�����ɘ�늉�uA ݔ�뵽PC2(555 �r(sh��)���·) ��2 �_���t��(d��ng)uA С���Դ늉���1 �M 3(4V) �r(sh��)��PC2 ��3 �_���D(zhu��n)����λ����D4-17(b) ��������֮��������
ͬ�r(sh��)��7 �_��(du��)��̎�ڽ�ֹ?f��n)�B(t��i)��
�@�r(sh��)���Դͨ�^(gu��)�λ��RP �������C1 �����PC2 ��6�_�λ�_(k��i)ʼ���������������D4-17(b) ��֮��������ʾ����(d��ng)UC �������Դ늉���2 �M 3(8V) �r(sh��)��PC2 ��3 �_�ַ��D(zhu��n)����λ����D4-17(b) ��������֮�½��ء�ͬ�r(sh��)��7 �_��(du��)�،�(d��o)ͨ�������C1 ��늡���(d��ng)2 �_�ϵIJɘ�늉����½�������4V �r(sh��)��PC2 ��3 �_�ַ��D(zhu��n)����λ������ܶ���(f��)ʼ���͵õ���ռ�ձȿ��{(di��o)���}�_ϵ����
�ڈD4-17(b) �У�TC ���}�_���������ڰl(f��)늙C(j��)ݔ��늉�������֮����t2 �������C1 �ij�늕r(sh��)�g����RP ��׃����r�£�t2 ��ֵ�Dz�׃����������ռ�ձȣ�
D=t1 �M TC
ʽ����D ���}�_ϵ�е�ռ�ձȣ�t1 ���}�_������ms��TC���}�_������ms��
���@Ȼ��B �c(di��n)ݔ�����}�_ϵ�е�ռ�ձȵĴ�С�ͷ�ӳ�˰l(f��)늙C(j��)ݔ��늉����l���������������۵��}�_�����ǣ�
t1=TC �� t2
t1 ��t2 �ı�ֵ����ͨ�^(gu��)�{(di��o)��(ji��)RP ��(l��i)��׃��
����l(f��)늙C(j��)���D(zhu��n)���^(gu��)����ݔ��늉����l������������TC �pС��ռ�ձ�D Ҳ�pС��
4. �V���ͱ��^
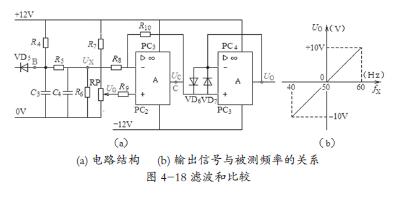
��D4-18(a) ��ʾ���шD4-17 ݔ����ռ�ձȿ��{(di��o)���}�_ϵ�н�(j��ng)C3��R5 ��C4 �V�������͵õ��ͱ��y(c��)�l�ʌ�(du��)��(y��ng)��ֱ��늉�UX���֏�RP �ϵõ���50Hz ��(du��)��(y��ng)�Ļ���(zh��n)늉�UG����UX ��UG �քeݔ�뵽�\(y��n)��Ŵ���PC3 �ăɂ�(g��)ݔ������M(j��n)�б��^����(d��ng)�l(f��)늙C(j��)���D(zhu��n)���^(gu��)����ݔ��늉����l�ʳ��^(gu��)��50Hz �r(sh��)��ռ�ձ�D ��UX �����p����
UX �� UG
UC ��UO ����“+”��
��֮����(d��ng)�l(f��)늙C(j��)���D(zhu��n)���^(gu��)����ݔ��늉����l�ʵ���50Hz �r(sh��)��ռ�ձ�D ��UX ��������
UX �� UG
UC ��UO ����“��”��
PC4 �ӳ�늉����S�·���ԼӴ���ݔ�����ʡ����õ���ݔ����̖(h��o)UO �ͱ��y(c��)�l�ʵ��P(gu��n)ϵ��D4-18(b) ��ʾ��
4.4.2 ׃�l�{(di��o)�ٵČ�(sh��)�F(xi��n)
4.4.2.1 �����ձ����210S ϵ��׃�l��
1. ���210S ϵ�е����c(di��n)
���210S ϵ��׃�l����һ��(g��)�o�����l����̖(h��o)�o����AUX���l�ʽo����̖(h��o)�ɏ�ԓ��ݔ������D4-19(a) ��ʾ����(d��ng)AUX �õ�����̖(h��o)�r(sh��)��늄�(d��ng)�C(j��)���D(zhu��n)���õ�ؓ(f��)��̖(h��o)�r(sh��)��늄�(d��ng)�C(j��)���D(zhu��n)��׃�l��ݔ���l�ʵĴ�С�c�o����̖(h��o)�Ľ^��(du��)ֵ����������D
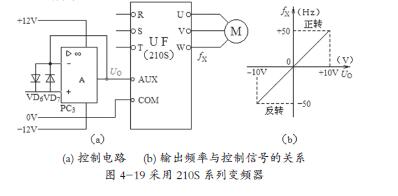

2. �����^(gu��)��
����������(d��ng)ˮ݆�l(f��)늙C(j��)ݔ��늉����l�ʳ��^(gu��)50Hz �r(sh��)��UO ��“��”��늄�(d��ng)�C(j��)���D(zhu��n)���P(gu��n)С��(d��o)�~�_(k��i)������֮����(d��ng)ˮ݆�l(f��)늙C(j��)ݔ��늉����l�ʵ���50Hz �r(sh��)��UO ��“��”��늄�(d��ng)�C(j��)���D(zhu��n)���Ӵ�(d��o)�~�_(k��i)�������@�늄�(d��ng)�C(j��)��“���D(zhu��n)”�c“���D(zhu��n)”��߀����ͨ�^(gu��)��׃�����M(j��n)���{(di��o)����
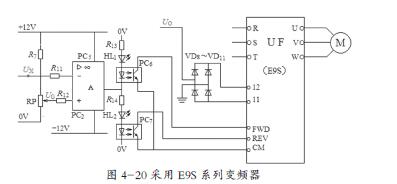
4.4.2.2 �����ձ���ʿE9S ϵ��׃�l��
1. ��ʿE9S ϵ��׃�l�������c(di��n)
(1) �l�ʽo��
E9S ϵ��׃�l�����](m��i)����D4-19(b) ��ʾ�����c(di��n)����o����̖(h��o)ݔ���( ��D4-20 �е�“12—11”��) ��ʾ��
(2) ���D(zhu��n)����
��ݔ���FWD ��REV �Q����FWD �õ���̖(h��o)�r(sh��)��늄�(d��ng)�C(j��)���D(zhu��n)��REV �õ���̖(h��o)�r(sh��)��늄�(d��ng)�C(j��)���D(zhu��n)����D4-20 ��ʾ��
2. �����·
(1) �l�ʽo��
��?y��n)�PC4 ��ݔ��늉�UO ���p���������E9S ׃�l��ֻ�ܽ��܆η����늉���������PC4 ��ݔ������ͨ�^(gu��)������(VD8~VD11) ���������E9S ��ݔ�����
(2) ���D(zhu��n)����
��(j��ng)�V���·�V����õ��IJɘ���̖(h��o)UX ������PC5 ��(g��u)�ɵı��^�·����(d��ng)�l(f��)늙C(j��)ݔ��늉����l�ʸ���50Hz �r(sh��)��UX��UG��PC5 ��ݔ���˞�“��”���������PC7 ��(d��o)ͨ��׃�l����REV�õ���̖(h��o)��늄�(d��ng)�C(j��)“���D(zhu��n)”���P(gu��n)Сˮ݆�C(j��)��(d��o)�~���_(k��i)������֮����(d��ng)�l(f��)늙C(j��)ݔ��늉����l�ʵ���50Hz �r(sh��)��UX �� UG��PC5 ��ݔ���˞�“��”���������PC6 ��(d��o)ͨ��׃�l����FWD �õ���̖(h��o)��늄�(d��ng)�C(j��)“���D(zhu��n)”���_(k��i)��ˮ݆�C(j��)��(d��o)�~���_(k��i)����
4.4.2.3 ��Ҫע��Ďׂ�(g��)��(w��n)�}
1. ׃�l�����M(j��n)����(c��)��횷�(w��n)��
׃�l����(du��)�M(j��n)��늉��IJ���(d��ng)��������һ��Ҫ������������վݔ��늉��IJ���(d��ng)���ȳ����DZ��^��ġ��������׃�l�����M(j��n)����(c��)ֱ�ӽ����l(f��)늙C(j��)ݔ���˵�Ԓ��׃�l�����y���������������ԣ���׃�l��֮ǰ����횽��뽻����(w��n)���Դ���Ա��C׃�l������������������UPS �Դ�o����(g��)�����·���( ����׃�l��)���t�ǵ����C��׃�l��������������߀��ʹ���·���l�r(sh��)���w܇(ch��)���o(h��)�Ŀɿ��Ը��������
2. ׃�l�����x��
�������ཻ����(w��n)���Դ�r(ji��)���^�F���w�eҲ�ʿ��x��“���M(j��n)������220V”��׃�l�����@�ӣ��M(j��n)����(c��)ʹ�Æ��ཻ����(w��n)���Դ�Ϳ�������
3. 늄�(d��ng)�C(j��)�Ľӷ�
3. 늄�(d��ng)�C(j��)�Ľӷ�
С����늄�(d��ng)�C(j��)���@�M֮�g, �ձ�������νӷ�����(d��ng)�Դ��늉���380V �r(sh��)��ÿ���@�M����늉���220V����׃�l����ݔ����늉���220V���t늄�(d��ng)�C(j��)ÿ���@�M����늉���ֻ��127V ������(du��)����̎���������£�
(1) �����ķ���
��늄�(d��ng)�C(j��)���@�M�ӳ���������ʹÿ���@�M����늉���220V�����@�r(sh��)��늄�(d��ng)�C(j��)�Č�(sh��)�H������������׃�l��������Ҳ��(y��ng)����(y��ng)������
(2) ��(sh��)�H̎��
��(sh��)�H����������������Ҫ��׃늄�(d��ng)�C(j��)���@�M�ӷ����@����?y��n)飬ԭ�?l��i)��늄�(d��ng)�C(j��)��ֱ�ӽӵ��l(f��)늙C(j��)ݔ���˵�����늄�(d��ng)�C(j��)�x�͕r(sh��)���ѳ�ֿ��]���Դ늉��IJ���(d��ng)�����ܴ�����c(di��n)��������ʹ��늉��͕ܵr(sh��)Ҳ���Ä�(d��ng)ˮ݆�C(j��)�Č�(d��o)�~������׃�l���������������˷�(w��n)���h(hu��n)��(ji��)��늄�(d��ng)�C(j��)�ľ�늉��mȻֻ��220V�������^��(w��n)������δʹ���{(di��o)�����r(sh��)�l(f��)늙C(j��)ݔ���˵���;�늉���ȣ�Ҳ���o(w��)�������ԣ�늄�(d��ng)�C(j��)���@�M�ӷ���ʹ����׃��Ҳ���Ä�(d��ng)�����@�r(sh��)��늄�(d��ng)�C(j��)�Č�(sh��)�H����ֻ�����~��������(1/1.73) ������׃�l��������ԭ�t��Ҳ������(y��ng)�pС��
4.5 늴��x�����ķ����Ƅ�(d��ng)
�_(k��i)�l(f��)����
ij�S��һ�_(t��i)�O(sh��)�����Ƀɂ�(g��)늴��x�����������D(zhu��n)�������Ƅ�(d��ng)�r(sh��)��늄�(d��ng)�C(j��)�����Ƅ�(d��ng)�������ٶ��^����Д�늄�(d��ng)�C(j��)���Դ�������ڷ����Ƅ�(d��ng)�Ľ��|�����ן������ٶ��^����Ą�(d��ng)��Ҳ�����(zh��n)�_�������м�(x��)�о��������ԭ�������Q��������늄�(d��ng)�C(j��)�ķ����Ƅ�(d��ng)������늴��x������(l��i)��(sh��)�F(xi��n)�����Ƅ�(d��ng)���M(f��i)�ò��࣬�ֽ�Q�ˆ�(w��n)�}��
4.5.1 ���·�ĸ��M(j��n)
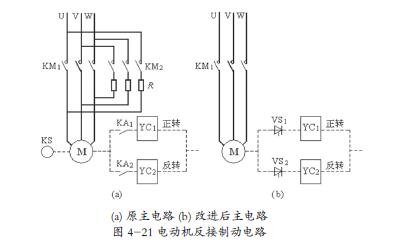
4.5.1.1 ԭ�·�����چ�(w��n)�}
1. 늄�(d��ng)�C(j��)�·
��D4-21(a) ��ʾ�����|��KM1 ����늄�(d��ng)�C(j��)������(d��ng)��ͣ�C(j��)��KM2 ���ڷ����Ƅ�(d��ng)�����R �������Ʒ��ӕr(sh��)�������С��KS ���ٶ��^��������ڮ�(d��ng)늄�(d��ng)�C(j��)�����D(zhu��n)�����D(zhu��n)���^(gu��)�������^(gu��)��r(sh��)�Д��·��
2. �x�����·
�x�������ڿ���ؓ(f��)�d��(c��)�����D(zhu��n)����YC1 ��늕r(sh��)��ؓ(f��)�d���D(zhu��n)��YC2 ��늕r(sh��)��ؓ(f��)�d���D(zhu��n)��YC1 ��YC2 ���^���KA1 ��KA2 ������
3. ���چ�(w��n)�}
(1) �������^��
���|��KM2 �ڽ�ͨ�r(sh��)��������^�����|�^���דp�ģ�������늴��x�������@�M�Ǵ�늸����^����|�c(di��n)�ڔ��_(k��i)�r(sh��)���^������Ҳ�^����
(2) ���Ʋ���(zh��n)
�ٶ��^����^(gu��)��r(sh��)�Ĕ��_(k��i)�r(sh��)������ͨ�^(gu��)�{(di��o)��(ji��)���ɵ��ɾo�ȁ�(l��i)�{(di��o)����������������(zh��n)��ؓ(f��)�d��ͣ�C(j��)�r(sh��)���^�m(x��)���D(zhu��n)���D(zhu��n)�������D(zhu��n)���D(zhu��n)����(zh��n)�_ͣס����r�^����
4.5.1.2 ���M(j��n)����
1. ���·
ȡ�������Ƅ�(d��ng)�·���ٶ��^�������D5-21(b) ��ʾ��
2. 늴��x�����Ŀ���
ȡ���^���KA1 ��KA2�����ɾ��l��VS1 ��VS2 ��(l��i)����늴��x��������D4-21(b) ��ʾ���ǵ���Q���^����|�c(di��n)���ן��ĵĆ�(w��n)�}��Ҳ���ڌ�(sh��)�F(xi��n)�x�����ķ����Ƅ�(d��ng)��
4.5.2 ���l�ܵ��|�l(f��)�·
4.5.2.1 ��Ҫ���c(di��n)
1. ���l�ܵĹ������c(di��n)
���l��VS1 ��VS2 ֻ����늴��x������ͨ��c�����������Ҫ�{(di��o)��(ji��)�����|�l(f��)�·�мȲ���Ҫ“�����·”��Ҳ����Ҫͬ��������
2. �������D(zhu��n)�Ŀ���
���l��VS1 ��VS2 �Č�(d��o)ͨ�c����ݔ��“��”��̖(h��o)��“��”��̖(h��o)��(l��i)�Q������(d��ng)ݔ����̖(h��o)��“+”�r(sh��)��VS1 ��(d��o)ͨ��YC1 ���늶�������ؓ(f��)�d���D(zhu��n)����֮����(d��ng)ݔ����̖(h��o)��“��”�r(sh��)��VS2 ��(d��o)ͨ��YC2 ��늲�������ؓ(f��)�d���D(zhu��n)��
4.5.2.2 �|�l(f��)�·
���l�ܵ��|�l(f��)�·��D4-22(a) ��ʾ��
1. ���D(zhu��n)�|�l(f��)�^(gu��)��
��(d��ng)�|�l(f��)�·��ݔ��˼���“��”��̖(h��o)�r(sh��)�����w��VT5͌�(d��o)ͨ����VT6 ��ֹ���tA �c(di��n)����λ��VT3 ��ֹ���Դ“��”ͨ�^(gu��)R5 �������C1 �����B �c(di��n)�λ��������(d��ng)B �c(di��n)�λ������һ���̶ȕr(sh��)��VT1 ��(d��o)ͨ���}�_׃����PT1 �õ��|�l(f��)��̖(h��o)�����l��VS1 ��(d��o)ͨ�������x����������ؓ(f��)�d���D(zhu��n)��
2. ���D(zhu��n)�|�l(f��)�^(gu��)��
��(d��ng)�|�l(f��)�·��ݔ��˼���“��”��̖(h��o)�r(sh��)�����w��VT5 ��ֹ����VT6 ͌�(d��o)ͨ���tC �c(di��n)�����λ��VT4 ��ֹ���Դͨ�^(gu��)R6�������C2 ��늣�D �c(di��n)�λ��������(d��ng)D �c(di��n)�λ������һ���̶ȕr(sh��)��VT2 ��(d��o)ͨ���}�_׃����PT2 �õ��|�l(f��)��̖(h��o)�����l��VS2 ��(d��o)ͨ�������x����������ؓ(f��)�d���D(zhu��n)��
4.5.2.3 �����Ƅ�(d��ng)�Č�(sh��)ʩ
1. �·���c(di��n)
늴��x���������Ƅ�(d��ng)�Č�(sh��)ʩ�dz���(ji��n)�Σ�ֻ���ڿ�����̖(h��o)�c�|�l(f��)�·��ݔ���֮�g��(li��n)һ��(g��)������ݲ�(li��n)���·��������D4-22(b) ��ʾ��ؓ(f��)�d���������D(zhu��n)�Ǹ���(j��)���a(ch��n)�C(j��)е����Ҫ�����^���KA1 ��KA2 ������
2. ���D(zhu��n)����
��(d��ng)KA1 �]�ϕr(sh��)���Դ“��”��(j��ng)�λ��RP ͨ���|�l(f��)�·��ʹ���l��VS1 ��õ��|�l(f��)��̖(h��o)����(d��o)ͨ��YC1 ������ؓ(f��)�d���D(zhu��n)���c��ͬ�r(sh��)�������C3 �������“��”��“��”��
3. ͣ�C(j��)����
��(d��ng)KA1 ���_(k��i)�r(sh��)�������C3 ���(c��)��“��”��̖(h��o)�M(j��n)���|�l(f��)�·��ݔ�����ʹ���l��VS2 ��õ��|�l(f��)��̖(h��o)����(d��o)ͨ��YC2������ؓ(f��)�d���D���D(zhu��n)�����������C3 �ϵ�늺ɺܿ���ʧ�����ԣ�ؓ(f��)�dֻ��ͣס��������(hu��)���D(zhu��n)����˶���(sh��)�F(xi��n)�˷����Ƅ�(d��ng)���{(di��o)��(ji��)�λ��RP�����{(di��o)��(ji��)��C3 �ķ�늕r(sh��)�g��Ҳ���{(di��o)��(ji��)�˷����x���������ϕr(sh��)�g������ʹؓ(f��)�d��ͣ�C(j��)ʮ�־���(zh��n)�����D(zhu��n)���ƕr(sh��)Ҳһ�����Ͳ���٘���ˡ�
4.5.3 ���ٷ���·
4.5.3.1 �������D(zhu��n)���ڵĆ�(w��n)�}
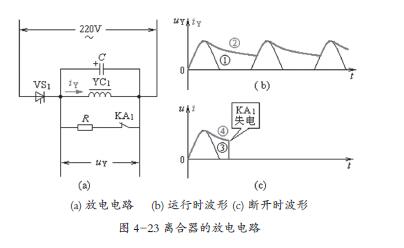
1. �x������ͨ��c���
��?y��n)�ÿ��(g��)�x����ֻ��һ��(g��)���l���M(j��n)�а벨�������벨�������늉�������D4-23(b) ��֮��������ʾ������ʹ������^ƽ��(w��n)������������C �M(j��n)�ОV�����V����������������������ʾ��
��(d��ng)VS1 ���|�l(f��)��̖(h��o)���N(xi��o)����һ���棬YC1 �ľ�Ȧ�����m(x��)�������������l���ֲ��������P(gu��n)������һ���棬�����CҲҪ��YC1 ������Y(ji��)����YC1 �����������������ʧ�����ԣ�YC1 ���ܺܿ�Ó�_(k��i)���������x��������Ó�_(k��i)�ĬF(xi��n)�����@��(du��)������늴��x������(sh��)�F(xi��n)�������D(zhu��n)���τ�(d��ng)ϵ�y(t��ng)��(l��i)�f(shu��)���Ϳ��ܳ��F(xi��n)��(d��ng)���D(zhu��n)���x�������ϕr(sh��)�����D(zhu��n)���x������δÓ�_(k��i)��Σ�U(xi��n)���Ρ�
2. ����Ó�_(k��i)�Ľ�Q
����ʹVS1 ���|�l(f��)��̖(h��o)���N(xi��o)����YC1 ��Ȧ������܉�ܿ���ʧ����YC1 �·�ﲢ(li��n)��һ��(g��)��늻�·����D4-23(a)��֮KA1 �Ą�(d��ng)���|�c(di��n)�����R ��ʾ����(d��ng)KA1 �����VS1 ��(d��o)ͨ��YC1 ������ؓ(f��)�d���D(zhu��n)�r(sh��)��KA1 �Ą�(d��ng)���|�c(di��n)�ǔ��_(k��i)������늻�·������������(d��ng)��ҪYC1 Ó�_(k��i)�r(sh��)��KA1 ��ʧ������(d��ng)���|�c(di��n)�]�ϣ������C ��Ѹ����R �����ʹYC1 Ѹ��Ó�_(k��i)���Ķ��������x��������Ó�_(k��i)�ĬF(xi��n)����
СС�w��(hu��)
����늴��x������(l��i)��(sh��)�F(xi��n)�������D(zhu��n)���׃�X݆��ĽM�����{(di��o)�ٵķ����������a(ch��n)�C(j��)е�Еr(sh��)�Б�(y��ng)�������������^�������������龧�l�ܿ��ƺ��Ա��^���ؽ�Q�����Ƅ�(d��ng)�Ć�(w��n)�}��
����늴��x������(l��i)��(sh��)�F(xi��n)�������D(zhu��n)���׃�X݆��ĽM�����{(di��o)�ٵķ����������a(ch��n)�C(j��)е�Еr(sh��)�Б�(y��ng)�á����������^�������������龧�l�ܿ��ƺ������Ա��^���ؽ�Q�����Ƅ�(d��ng)�Ć�(w��n)�}��